The design and control of a robot are very tightly coupled. The way we design a robot determines the way it can be controlled, and vice versa. Machine learning can be applied not only to optimize the robot motion controllers, but also to evolve robot designs with a particular design objective in mind.
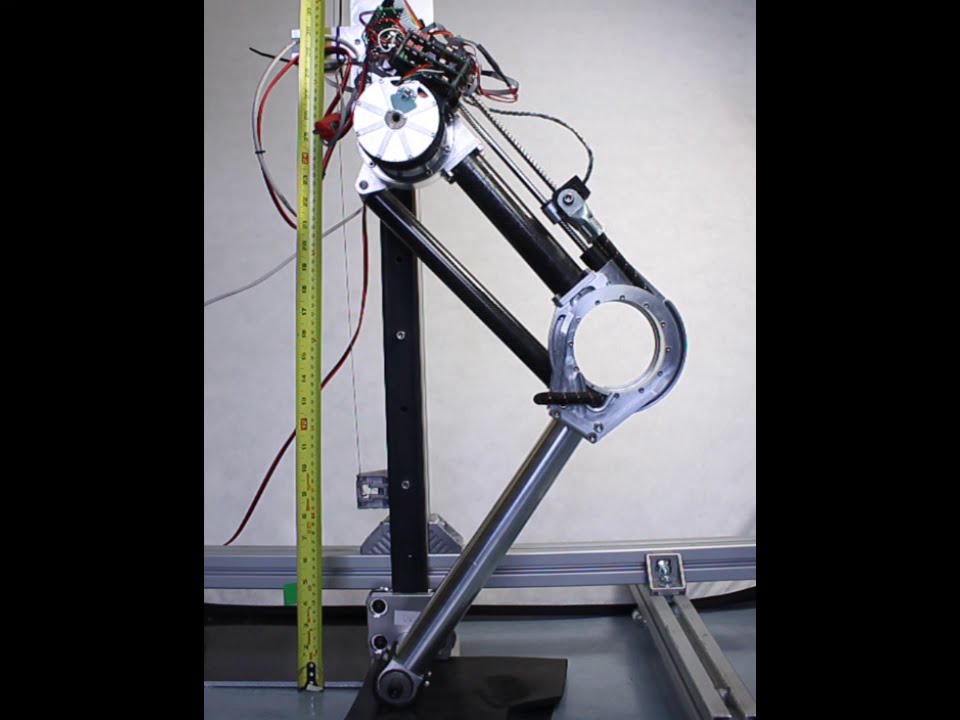
Jumping robot with active and passive compliance
Kinematic-free Position Control of a Robot Arm
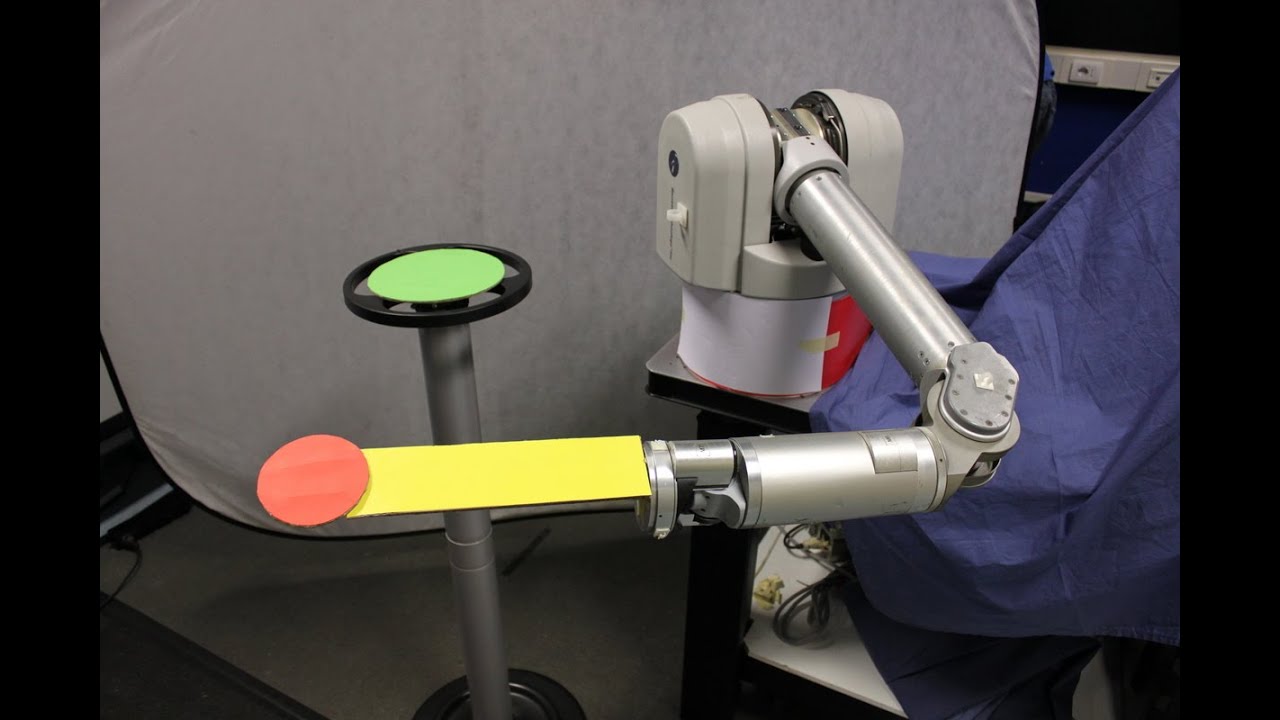
Haptic Exploration of Unknown Surfaces with Discontinuities

Robot WALK-MAN at DARPA Robotics Challenge

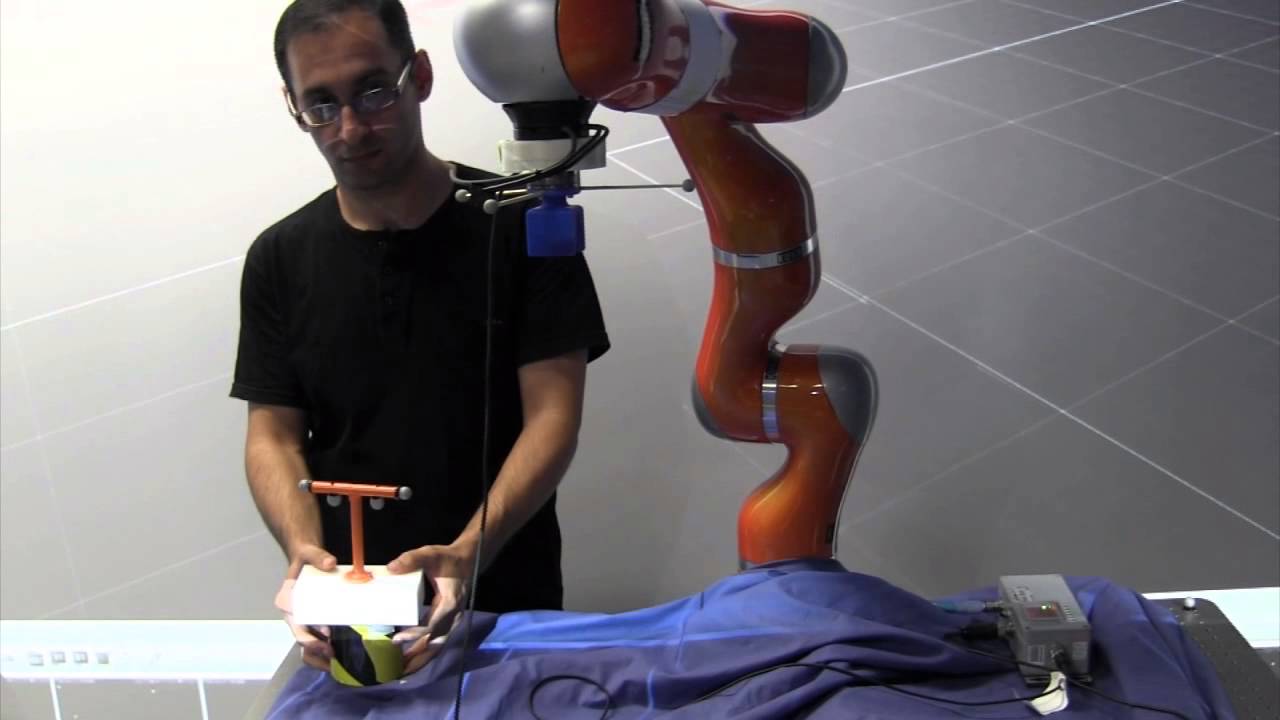
Testing the impedance controller and puppeteering contol mode on Robot DE NIRO

Autonomous Robot Valve Turning
Publications
- Fabian Falck, Sagar Doshi, Marion Tormento, Gor Nersisyan, Nico Smuts, John Lingi, Kim Rants, Roni Permana Saputra, Ke Wang, Petar Kormushev, "Robot DE NIRO: A Human-Centered, Autonomous, Mobile Research Platform for Cognitively-Enhanced Manipulation", In Frontiers in Robotics and AI, 2020.
- Fabian Falck, Kawin Larppichet, Petar Kormushev, "DE VITO: A Dual-arm, High Degree-of-freedom, Lightweight, Inexpensive, Passive Upper-limb Exoskeleton for Robot Teleoperation", In Proc. 20th International Conference Towards Autonomous Robotic Systems (TAROS 2019), London, UK, 2019. (Best Paper Award)
- Nemanja Rakicevic, Petar Kormushev, "Active Learning via Informed Search in Movement Parameter Space for Efficient Robot Task Learning and Transfer", In Autonomous Robots, Springer, 2019.
- Fabian Falck, Sagar Doshi, Nico Smuts, John Lingi, Kim Rants, Petar Kormushev, "Human-centered manipulation and navigation with Robot DE NIRO", In IROS 2018 Workshop: Towards Robots that Exhibit Manipulation Intelligence, IEEE/RSJ Intl Conf. on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018.
- Roni Permana Saputra, Petar Kormushev, "ResQbot: A Mobile Rescue Robot with Immersive Teleperception for Casualty Extraction", In Proc. 19th International Conference Towards Autonomous Robotic Systems (TAROS 2018), Bristol, UK, 2018.
- Roni Permana Saputra, Petar Kormushev, "ResQbot: A Mobile Rescue Robot for Casualty Extraction", In Proc. 2018 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2018), Chicago, USA, pp. 239-240, 2018.

Contact us
Senior Lecturer (Associate Professor)
Dyson School of Design Engineering
E-mail: p.kormushev@imperial.ac.uk
Address: 25 Exhibition Road, South Kensington, London, SW7 2DB

